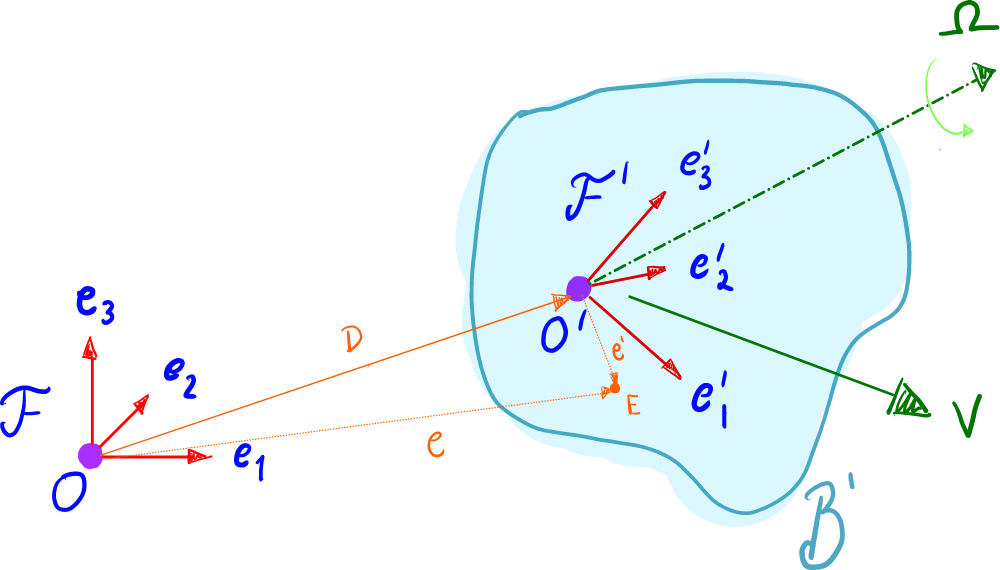
Algo importante que debemos hacer ahora es encontrar las derivadas o tasas de cambio de los vectores base { e 1 ′ , e 2 ′ , e 3 ′ } \{ \mathbf{e}'_1, \mathbf{e}'_2, \mathbf{e}'_3 \} { e 1 ′ , e 2 ′ , e 3 ′ } F ´ \mathcal{F}´ F ´
Pensemos en una partícula E E E B ′ \mathcal{B'} B ′ F ′ \mathcal{F'} F ′ e \mathbf{e} e e ′ \mathbf{e'} e ′ E E E O O O O ′ O' O ′
Entonces,
e = D + e ′ \mathbf{e} = \mathbf{D} + \mathbf{e'} e = D + e ′ donde como vemos, D \mathbf{D} D O ′ O' O ′ O O O
por lo que:
( d e d t ) F = ( d D d t ) F + ( d e ′ d t ) F \left( \frac{d\mathbf{e}}{dt} \right) _{\mathcal{F}} = \left(\frac{d \mathbf{D}}{dt}\right)_{\mathcal{F}} + \left(\frac{d \mathbf{e'}}{dt}\right)_{\mathcal{F}} ( d t d e ) F = ( d t d D ) F + ( d t d e ′ ) F = V + ( d e ′ d t ) F = \mathbf{V} + \left(\frac{d \mathbf{e'}}{dt}\right)_{\mathcal{F}} = V + ( d t d e ′ ) F en donde sabemos que V \mathbf{V} V O ′ O' O ′ O O O ( d e d t ) F \left( \frac{d\mathbf{e}}{dt} \right)_{\mathcal{F}} ( d t d e ) F E E E
V E = V o ′ + ( d e ′ d t ) F \mathbf{V^{E}} = \mathbf{V}^{o'} + \left( \frac{d\mathbf{e'}}{dt} \right)_{\mathcal{F}} V E = V o ′ + ( d t d e ′ ) F Vale la pena recordar un teorema muy importante.
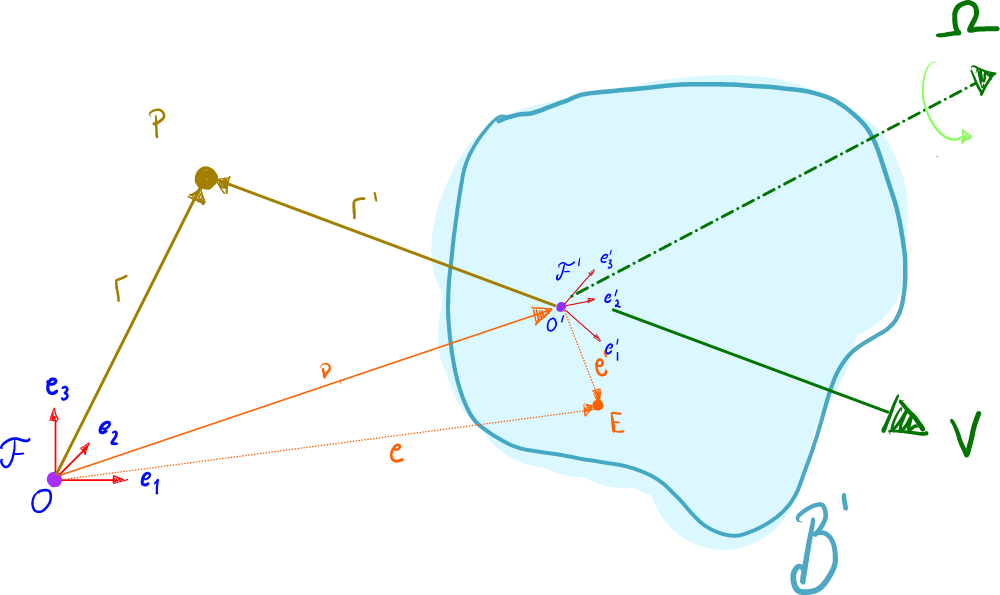
Teorema: Existencia de la velocidad angular. Supongamos que un cuerpo rígido está en movimiento completamente general y sea B cualquiera de sus partículas. Entonces existe un único vector 𝜔(t) tal que la velocidad de cualquier partícula P del cuerpo está dada por la fórmula: 𝒗ᴾ = 𝒗ᴮ + 𝜔 × (𝒓 − 𝒃) , donde 𝒓 y 𝒃 son los vectores posición de P y B , y 𝒗ᴮ es la velocidad de B . Lo que nos dice este teorema es que podemos entender el movimiento de cualquier rígido como una traslación con velocidad v B \mathbf{v}^{B} v B ω \omega ω B B B
Por lo tanto, regresando a nuestro problema, tendríamos que:
V E = V o ′ + ( d e ′ d t ) F = V o ′ + Ω × ( e − D ) = V o ′ + Ω × e ′ \begin{align*} \mathbf{V^{E}} &= \mathbf{V}^{o'} + \left( \frac{d\mathbf{e'}}{dt} \right)_{\mathcal{F}} \\ &= \mathbf{V}^{o'} + \Omega \times (\mathbf{e} - \mathbf{D}) \\ &= \mathbf{V}^{o'} + \Omega \times \mathbf{e'} \end{align*} V E = V o ′ + ( d t d e ′ ) F = V o ′ + Ω × ( e − D ) = V o ′ + Ω × e ′ Entonces podemos concluir que
( d e ′ d t ) F = Ω × e ′ \left( \frac{d\mathbf{e'}}{dt} \right)_{\mathcal{F}} = \Omega\times \mathbf{e'} ( d t d e ′ ) F = Ω × e ′ y esto aplica para cualquier vector posición e ′ \mathbf{e'} e ′ O ′ O' O ′ B ′ \mathcal{B'} B ′ ( e 1 ′ , e 2 ′ , e 3 ′ ) (\mathbf{e_{1}', \mathbf{e_{2}}', \mathbf{e_{3}'}} ) ( e 1 ′ , e 2 ′ , e 3 ′ )
( d e j ′ d t ) F = Ω × e j ′ \left( \frac{d\mathbf{e_{j}'}}{dt} \right)_{\mathcal{F}} = \Omega\times \mathbf{e_{j}'} ( d t d e j ′ ) F = Ω × e j ′ ∴ e ˙ 1 ′ = Ω × e 1 ′ , e ˙ 2 ′ = Ω × e 2 ′ , e ˙ 3 ′ = Ω × e 3 ′ \therefore \quad\quad \mathbf{\dot{e}_{1}'} = \Omega\times \mathbf{e_{1}'}, \quad \mathbf{\dot{e}_{2}'} = \Omega\times \mathbf{e_{2}'}, \quad \mathbf{\dot{e}_{3}'} = \Omega\times \mathbf{e_{3}'} ∴ e ˙ 1 ′ = Ω × e 1 ′ , e ˙ 2 ′ = Ω × e 2 ′ , e ˙ 3 ′ = Ω × e 3 ′ Donde sabemos que Ω \Omega Ω F ′ \mathcal{F}' F ′ F \mathcal{F} F
Entonces ahora sí, lo que nos interesaba saber era cómo se veían las tasas de cambio o derivadas de cualquier cantidad vectorial u ( t ) u(t) u ( t ) u \mathbf{u} u { e 1 , e 2 , e 3 } \{\mathbf{e_{1}}, \mathbf{e_{2}}, \mathbf{e_{3}} \} { e 1 , e 2 , e 3 }
u = u 1 ′ e 1 ′ + u 2 ′ e 2 ′ + u 3 ′ e 3 ′ \mathbf{u} = u_{1}'\mathbf{e_{1}'} + u_{2}'\mathbf{e_{2}'} + u_{3}'\mathbf{e_{3}'} u = u 1 ′ e 1 ′ + u 2 ′ e 2 ′ + u 3 ′ e 3 ′ Entonces:
( d u d t ) F = ( d ( u 1 ′ e 1 ′ ) d t ) F + ( d ( u 2 ′ e 2 ′ ) d t ) F + ( d ( u 3 ′ e 3 ′ ) d t ) F = ( u ˙ 1 ′ e 1 ′ + u ˙ 2 ′ e 2 ′ + u ˙ 3 ′ e 3 ′ ) + u 1 ′ e ˙ 1 ′ + u 2 ′ e ˙ 2 ′ + u 3 ′ e ˙ 3 ′ = ( d u d t ) F ′ + u 1 ′ ( Ω × e 1 ′ ) + u 2 ′ ( Ω × e 2 ′ ) + u 3 ′ ( Ω × e 3 ′ ) = ( d u d t ) F ′ + Ω × ( u 1 ′ e 1 ′ + u 2 ′ e 2 ′ + u 3 ′ e 3 ′ ) = ( d u d t ) F ′ + Ω × u . \begin{align*} \left(\frac{d\mathbf{u}}{dt}\right)_{\mathcal{F}} &= \left(\frac{d(u'_{1} e'_1)}{dt}\right)_{\mathcal{F}} + \left(\frac{d(u'_{2} e'_2)}{dt}\right)_{\mathcal{F}} + \left(\frac{d(u'_{3} e'_3)}{dt}\right)_{\mathcal{F}} \\ &= (\dot{u}'_{1} e'_1 + \dot{u}'_{2} e'_2 + \dot{u}'_{3} e'_3) + u'_{1} \dot{e}'_1 + u'_{2} \dot{e}'_2 + u'_{3} \dot{e}'_3 \\ &= \left(\frac{du}{dt}\right)_{\mathcal{F'}} + u'_{1} (\Omega \times \mathbf{e}'_1) + u'_{2} (\Omega \times \mathbf{e}'_2) + u'_{3} (\Omega \times \mathbf{e}'_3) \\ &= \left(\frac{du}{dt}\right)_{\mathcal{F'}} + \Omega \times (u'_{1} \mathbf{e}'_1 + u'_{2} \mathbf{e}'_2 + u'_{3} \mathbf{e}'_3) \\ &= \left(\frac{du}{dt}\right)_{\mathcal{F'}} + \Omega \times \mathbf{u}. \end{align*} ( d t d u ) F = ( d t d ( u 1 ′ e 1 ′ ) ) F + ( d t d ( u 2 ′ e 2 ′ ) ) F + ( d t d ( u 3 ′ e 3 ′ ) ) F = ( u ˙ 1 ′ e 1 ′ + u ˙ 2 ′ e 2 ′ + u ˙ 3 ′ e 3 ′ ) + u 1 ′ e ˙ 1 ′ + u 2 ′ e ˙ 2 ′ + u 3 ′ e ˙ 3 ′ = ( d t d u ) F ′ + u 1 ′ ( Ω × e 1 ′ ) + u 2 ′ ( Ω × e 2 ′ ) + u 3 ′ ( Ω × e 3 ′ ) = ( d t d u ) F ′ + Ω × ( u 1 ′ e 1 ′ + u 2 ′ e 2 ′ + u 3 ′ e 3 ′ ) = ( d t d u ) F ′ + Ω × u . Por lo tanto tendríamos que:
( d u d t ) F = ( d u d t ) F ′ + Ω × u \left( \frac{d\mathbf{u}}{dt} \right)_{\mathcal{F}} = \left( \frac{d\mathbf{u}}{dt} \right)_{\mathcal{F}'} + \Omega\times \mathbf{u} ( d t d u ) F = ( d t d u ) F ′ + Ω × u Ahora podemos ver cómo se transforma, por ejemplo, la velocidad entre marcos de referencia.
Entonces, supongamos una partícula P P P r \mathbf{r} r F \mathcal{F} F r ′ \mathbf{r'} r ′ F ′ \mathcal{F'} F ′
r = D + r ′ \mathbf{r} = \mathbf{D} + \mathbf{r'} r = D + r ′ Por lo tanto:
( d r d t ) F = ( d D d t ) F + ( d r ′ d t ) F v = V + ( d r ′ d t ) F \begin{align*} \left( \frac{d\mathbf{r}}{dt} \right)_{\mathcal{F}} &= \left( \frac{d\mathbf{D}}{dt} \right)_{\mathcal{F}} + \left( \frac{d\mathbf{r'}}{dt} \right)_{\mathcal{F}} \\ \mathbf{ v}&= \mathbf{V} + \left( \frac{d\mathbf{r'}}{dt} \right)_{\mathcal{F}} \end{align*} ( d t d r ) F v = ( d t d D ) F + ( d t d r ′ ) F = V + ( d t d r ′ ) F Pero ya sabemos que ( d u d t ) F = ( d u d t ) F ′ + Ω × u \left( \frac{d\mathbf{u}}{dt} \right)_{\mathcal{F}} = \left( \frac{d\mathbf{u}}{dt} \right)_{\mathcal{F}'} + \Omega\times \mathbf{u} ( d t d u ) F = ( d t d u ) F ′ + Ω × u
( d r ′ d t ) F = ( d r ′ d t ) F ′ + Ω × r ′ = v ′ + Ω × r ′ \begin{align*} \left( \frac{d\mathbf{r'}}{dt} \right)_{\mathcal{F}} &= \left( \frac{d\mathbf{r'}}{dt} \right)_{\mathcal{F}'} + \Omega\times \mathbf{r'} \\ &= \mathbf{v'} + \Omega\times \mathbf{r'} \end{align*} ( d t d r ′ ) F = ( d t d r ′ ) F ′ + Ω × r ′ = v ′ + Ω × r ′ Entonces tendríamos que:
v = V + v ′ + Ω × r ′ \mathbf{v} = \mathbf{V} + \mathbf{v'} + \Omega\times \mathbf{r'} v = V + v ′ + Ω × r ′ Lo que podemos ver de esta fórmula es que, la velocidad "real" del punto P P P v ′ \mathbf{v'} v ′ V + Ω × r ′ \mathbf{V} + \Omega\times \mathbf{r'} V + Ω × r ′
Para poner un ejemplo de cómo yo entiendo esa fórmula es suponiendo que nosotros, desde el suelo queremos calcular la velocidad a la que se mueve un pasajero en un avión, primero tendríamos que tomar en cuenta la velocidad a la que se mueve el avión de nosotros V \mathbf{V} V v ′ \mathbf{v'} v ′ Ω × r ′ \Omega\times \mathbf{r'} Ω × r ′
Ahora, sabemos que para obtener la aceleración, volvemos a derivar, entonces:
( d v d t ) F = ( d V d t ) F + ( d v ′ d t ) F + ( d d t ( Ω × r ′ ) ) F \left( \frac{d\mathbf{v}}{dt} \right)_{\mathcal{F}} = \left( \frac{d\mathbf{V}}{dt} \right)_{\mathcal{F}}+ \left( \frac{d\mathbf{v'}}{dt} \right)_{\mathcal{F}} + \left( \frac{d}{dt} (\Omega \times \mathbf{r'}) \right)_{\mathcal{F}} ( d t d v ) F = ( d t d V ) F + ( d t d v ′ ) F + ( d t d ( Ω × r ′ ) ) F en donde sabemos que:
d d t ( Ω × r ′ ) = d Ω d t × r ′ + Ω × d r ′ d t \frac{d}{dt} (\Omega \times \mathbf{r'}) = \frac{d\Omega}{dt} \times \mathbf{r'} + \Omega \times \frac{d\mathbf{r'}}{dt} d t d ( Ω × r ′ ) = d t d Ω × r ′ + Ω × d t d r ′ reemplazando tenemos que
( d v d t ) F = ( d V d t ) F + ( d v ′ d t ) F + ( d Ω d t ) F × r ′ + Ω × ( d r ′ d t ) F \left( \frac{d\mathbf{v}}{dt} \right)_{\mathcal{F}} = \left( \frac{d\mathbf{V}}{dt} \right)_{\mathcal{F}}+ \left( \frac{d\mathbf{v'}}{dt} \right)_{\mathcal{F}} + \left( \frac{d\Omega}{dt} \right)_{\mathcal{F}} \times \mathbf{r'} + \Omega \times \left( \frac{d\mathbf{r'}}{dt} \right)_{\mathcal{F}} ( d t d v ) F = ( d t d V ) F + ( d t d v ′ ) F + ( d t d Ω ) F × r ′ + Ω × ( d t d r ′ ) F Entonces simplificando tenemos que
a = A + ( d v ′ d t ) F + Ω ˙ × r ′ + Ω × ( d r ′ d t ) F \mathbf{a} = \mathbf{A} + \left( \frac{d\mathbf{v'}}{dt} \right)_{\mathcal{F}} + \dot{\Omega} \times \mathbf{r'} + \Omega \times \left( \frac{d\mathbf{r'}}{dt} \right)_{\mathcal{F}} a = A + ( d t d v ′ ) F + Ω ˙ × r ′ + Ω × ( d t d r ′ ) F Recordamos que ( d r ′ d t ) F = v ′ + Ω × r ′ \left( \frac{d\mathbf{r'}}{dt} \right)_{\mathcal{F}} = \mathbf{v'} + \Omega\times \mathbf{r'} ( d t d r ′ ) F = v ′ + Ω × r ′ ( d v ′ d t ) F = a ′ + Ω × v ′ \left( \frac{d\mathbf{v'}}{dt} \right)_{\mathcal{F}} = \mathbf{a'} + \Omega\times \mathbf{v'} ( d t d v ′ ) F = a ′ + Ω × v ′
a = A + a ′ + Ω × v ′ + Ω × v ′ + Ω ˙ × r ′ + Ω × ( Ω × r ′ ) \mathbf{a} = \mathbf{A} + \mathbf{a'} + \Omega \times \mathbf{v'} + \Omega \times \mathbf{v'} + \dot{\Omega} \times \mathbf{r'} + \Omega \times (\Omega \times \mathbf{r'}) a = A + a ′ + Ω × v ′ + Ω × v ′ + Ω ˙ × r ′ + Ω × ( Ω × r ′ ) Simplificando los términos que se repiten, obtenemos:
a = A + a ′ + 2 Ω × v ′ + Ω ˙ × r ′ + Ω × ( Ω × r ′ ) \mathbf{a} = \mathbf{A} + \mathbf{a'} + 2\Omega \times \mathbf{v'} + \dot{\Omega} \times \mathbf{r'} + \Omega \times (\Omega \times \mathbf{r'}) a = A + a ′ + 2Ω × v ′ + Ω ˙ × r ′ + Ω × ( Ω × r ′ ) La expresión simplificada de la aceleración en un sistema de referencia rotativo que obtuvimos es:
a = A + a ′ + 2 Ω × v ′ + Ω ˙ × r ′ + Ω × ( Ω × r ′ ) \mathbf{a} = \mathbf{A} + \mathbf{a'} + 2\Omega \times \mathbf{v'} + \dot{\Omega} \times \mathbf{r'} + \Omega \times (\Omega \times \mathbf{r'}) a = A + a ′ + 2Ω × v ′ + Ω ˙ × r ′ + Ω × ( Ω × r ′ ) Y en el problema circular restringido de tres cuerpos, consideramos tres masas: m 1 m_1 m 1 m 2 m_2 m 2 m 3 m_3 m 3 m 1 m_1 m 1 m 2 m_2 m 2 m 3 m_3 m 3 m 1 m_1 m 1 m 2 m_2 m 2
Ahora, pensemos en cada término para nuestro problema.
A \mathbf{A} A
En este marco, m 1 m_1 m 1 m 2 m_2 m 2 A = 0 \mathbf{A} = 0 A = 0
a ′ \mathbf{a'} a ′ m 3 m_3 m 3
2 Ω × v ′ 2\Omega \times \mathbf{v'} 2Ω × v ′
Ω ˙ × r ′ \dot{\Omega} \times \mathbf{r'} Ω ˙ × r ′
Dado que el marco de referencia rota con una velocidad angular constante (la misma velocidad angular de la órbita mutua de m 1 m_1 m 1 m 2 m_2 m 2 Ω ˙ \dot{\Omega} Ω ˙
Ω × ( Ω × r ′ ) \Omega \times (\Omega \times \mathbf{r'}) Ω × ( Ω × r ′ )
Entonces, nos quedaría que:
a = a ′ + 2 Ω × v ′ + Ω × ( Ω × r ′ ) \mathbf{a} = \mathbf{a'} + 2\Omega \times \mathbf{v'} + \Omega \times (\Omega \times \mathbf{r'}) a = a ′ + 2Ω × v ′ + Ω × ( Ω × r ′ ) Por segunda ley de Newton tenemos que:
a = a ′ + 2 Ω × v ′ + Ω × ( Ω × r ′ ) = F m 3 \mathbf{a} = \mathbf{a'} + 2\Omega \times \mathbf{v'} + \Omega \times (\Omega \times \mathbf{r'}) = \frac{\mathbf{F}}{m_{3}} a = a ′ + 2Ω × v ′ + Ω × ( Ω × r ′ ) = m 3 F Pensando en que estamos describiendo la dinámica del tercer cuerpo m 3 m_{3} m 3 F = − ∇ U \mathbf{F} = -\nabla U F = − ∇ U
a = a ′ + 2 Ω × v ′ + Ω × ( Ω × r ′ ) = − ∇ U m 3 \mathbf{a} = \mathbf{a'} + 2\Omega \times \mathbf{v'} + \Omega \times (\Omega \times \mathbf{r'}) = -\frac{\nabla U}{m_{3}} a = a ′ + 2Ω × v ′ + Ω × ( Ω × r ′ ) = − m 3 ∇ U a ′ + 2 Ω × v ′ = − ∇ U m 3 − Ω × ( Ω × r ′ ) \mathbf{a'} + 2\Omega \times \mathbf{v'} = -\frac{\nabla U}{m_{3}}- \Omega \times (\Omega \times \mathbf{r'}) a ′ + 2Ω × v ′ = − m 3 ∇ U − Ω × ( Ω × r ′ ) Pero recordando que A ⃗ × ( B ⃗ × C ⃗ ) = ( A ⃗ ⋅ C ⃗ ) B ⃗ − ( A ⃗ ⋅ B ⃗ ) C ⃗ \vec{A} \times (\vec{B} \times \vec{C}) = (\vec{A} \cdot \vec{C}) \vec{B} - (\vec{A} \cdot \vec{B}) \vec{C} A × ( B × C ) = ( A ⋅ C ) B − ( A ⋅ B ) C
Entonces llegamos a que Ω × ( Ω × r ′ ) = ( Ω ⋅ r ′ ) Ω − ( Ω ⋅ Ω ) r ′ \Omega \times (\Omega \times \mathbf{r'}) = (\Omega \cdot \mathbf{r'}) \Omega - (\Omega \cdot \Omega) \mathbf{r'} Ω × ( Ω × r ′ ) = ( Ω ⋅ r ′ ) Ω − ( Ω ⋅ Ω ) r ′ Ω \Omega Ω r ′ \mathbf{r'} r ′ Ω ⋅ r ′ = 0 \Omega \cdot \mathbf{r'} = 0 Ω ⋅ r ′ = 0
Ω × ( Ω × r ′ ) = − ( Ω ⋅ Ω ) r ′ = − ∣ Ω ∣ 2 r ′ = − Ω 2 r ′ \Omega \times (\Omega \times \mathbf{r'}) = - (\Omega \cdot \Omega) \mathbf{r'} = -|\Omega|^{2}\mathbf{r'} = -\Omega^{2}\mathbf{r'} Ω × ( Ω × r ′ ) = − ( Ω ⋅ Ω ) r ′ = − ∣Ω ∣ 2 r ′ = − Ω 2 r ′ Entonces, tendríamos que:
a ′ + 2 Ω × v ′ = − ∇ U m 3 + Ω 2 r ′ \mathbf{a'} + 2\Omega \times \mathbf{v'} = -\frac{\nabla U}{m_{3}} + \Omega^{2}\mathbf{r'} a ′ + 2Ω × v ′ = − m 3 ∇ U + Ω 2 r ′ Para meter este último término dentro del gradiente tendríamos que integrarlo, por lo que tenemos:
a ′ + 2 Ω × v ′ = − ∇ ( U m 3 − 1 2 Ω 2 ( r ′ ) 2 ) \mathbf{a'} + 2\Omega \times \mathbf{v'} = -\nabla\left( \frac{U}{m_{3}} - \frac{1}{2}\Omega^{2}(\mathbf{r'})^{2} \right) a ′ + 2Ω × v ′ = − ∇ ( m 3 U − 2 1 Ω 2 ( r ′ ) 2 ) Ahora, U ( r ) U(\mathbf{r}) U ( r ) m 3 m_{3} m 3 m 1 m_{1} m 1 m 2 m_{2} m 2
En donde para este caso tendríamos que:
U ( r ) = − G m 1 m 3 ∣ r − r 1 ∣ − G m 2 m 3 ∣ r − r 1 ∣ U(\mathbf{r}) = -\frac{Gm_{1}m_{3}}{|\mathbf{r}-\mathbf{r_{1}}|}-\frac{Gm_{2}m_{3}}{|\mathbf{r}-\mathbf{r_{1}}|} U ( r ) = − ∣ r − r 1 ∣ G m 1 m 3 − ∣ r − r 1 ∣ G m 2 m 3 Sustituyendo esta expresión tenemos que:
a ′ + 2 Ω × v ′ = − ∇ ( − G m 1 ∣ r − r 1 ∣ − G m 2 ∣ r − r 2 ∣ − 1 2 Ω 2 ( r ′ ) 2 ) \mathbf{a'} + 2\Omega \times \mathbf{v'} = -\nabla\left( -\frac{Gm_{1}}{|\mathbf{r}-\mathbf{r_{1}}|} - \frac{Gm_{2}}{|\mathbf{r}-\mathbf{r_{2}}|} - \frac{1}{2}\Omega^{2}(\mathbf{r'})^{2} \right) a ′ + 2Ω × v ′ = − ∇ ( − ∣ r − r 1 ∣ G m 1 − ∣ r − r 2 ∣ G m 2 − 2 1 Ω 2 ( r ′ ) 2 ) Ahora veamos un simple esquema de nuestro problema. [dibujo]
Donde r = ( x , y , z ) \mathbf{r} = (x,y,z) r = ( x , y , z ) m 3 m_{3} m 3 m 1 m_{1} m 1 m 2 m_{2} m 2
Ahora, para simplificar, podemos hacer que:
m 1 + m 2 = 1 R = r 2 − r 1 = 1 Ω = 1 G = 1 \begin{align*} m_{1} + m_{2} &= 1 \\ R = \mathbf{r_{2}} - \mathbf{r_{1}} &= 1 \\ \Omega &=1 \\ G &= 1 \end{align*} m 1 + m 2 R = r 2 − r 1 Ω G = 1 = 1 = 1 = 1 Sabemos que la fórmula general para el centro de masa entre dos puntos masivos es:
C M = m 1 r 1 + m 2 r 2 m 1 + m 2 CM = \frac{m_{1}\mathbf{r_{1}}+m_{2}\mathbf{r_{2}}}{m_{1}+m_{2}} CM = m 1 + m 2 m 1 r 1 + m 2 r 2 Que se simplifica a:
C M = m 1 r 1 + m 2 r 2 CM = m_{1}\mathbf{r_{1}}+m_{2}\mathbf{r_{2}} CM = m 1 r 1 + m 2 r 2 Si alineamos el centro de masa en el origen, entonces llegamos a que: m 1 r 1 = − m 2 r 2 m_{1}\mathbf{r_{1}} = -m_{2}\mathbf{r_{2}} m 1 r 1 = − m 2 r 2
r 1 = − m 2 r 2 m 1 ( α ) r_{1} = -\frac{m_{2}\mathbf{r}_{2}}{m_{1}} \tag{$\alpha$} r 1 = − m 1 m 2 r 2 ( α ) Si ahora definimos μ = m 2 \mu = m_{2} μ = m 2 m 1 + m 2 = 1 m_{1} + m_{2} = 1 m 1 + m 2 = 1 m 1 + μ = 1 → m 1 = 1 − μ m_{1}+\mu=1 \rightarrow m_{1}=1-\mu m 1 + μ = 1 → m 1 = 1 − μ α \alpha α
r 1 = − m 2 r 2 m 1 = − μ 1 − μ r 2 r_{1} = -\frac{m_{2}\mathbf{r}_{2}}{m_{1}} = -\frac{\mu}{1-\mu}\mathbf{r_{2}} r 1 = − m 1 m 2 r 2 = − 1 − μ μ r 2 Pero recordando que r 2 − r 1 = 1 r_{2} - r_{1} = 1 r 2 − r 1 = 1
r 2 + μ 1 − μ r 2 = 1 r_{2} + \frac{\mu}{1-\mu}r_{2} = 1 r 2 + 1 − μ μ r 2 = 1 Simplificando llegamos a que:
r 2 ( 1 + μ 1 − μ ) = 1 r 2 ( 1 − μ + μ 1 − μ ) = 1 r 2 ( 1 1 − μ ) = 1 ∴ r 2 = 1 − μ \begin{align*} r_{2}\left( 1+\frac{\mu}{1-\mu} \right) &= 1 \\ r_{2}\left( \frac{1-\mu+\mu}{1-\mu} \right) &= 1 \\ r_{2}\left( \frac{1}{1-\mu} \right) &= 1 \\ \therefore r_{2} = 1-\mu \end{align*} r 2 ( 1 + 1 − μ μ ) r 2 ( 1 − μ 1 − μ + μ ) r 2 ( 1 − μ 1 ) ∴ r 2 = 1 − μ = 1 = 1 = 1 Y entonces:
r 1 = − m 2 r 2 m 1 = − μ 1 − μ r 2 = − μ 1 − μ ( 1 − μ ) = − μ r_{1} = -\frac{m_{2}\mathbf{r}_{2}}{m_{1}} = -\frac{\mu}{1-\mu}\mathbf{r_{2}} = -\frac{\mu}{1-\mu}(1-\mu)=-\mu r 1 = − m 1 m 2 r 2 = − 1 − μ μ r 2 = − 1 − μ μ ( 1 − μ ) = − μ Por lo tanto concluímos que:
r 1 = − μ = − m 2 r 2 = 1 − μ = m 1 \begin{align*} r_{1} = -\mu = -m_{2} \\ r_{2} = 1-\mu=m_{1} \end{align*} r 1 = − μ = − m 2 r 2 = 1 − μ = m 1 Y entonces, habíamos definido el siguiente potencial efectivo:
U ( r ) = ( − G m 1 ∣ r − r 1 ∣ − G m 2 ∣ r − r 2 ∣ − 1 2 Ω 2 r 2 ) U(r) = \left( -\frac{Gm_{1}}{|\mathbf{r}-\mathbf{r_{1}}|} - \frac{Gm_{2}}{|\mathbf{r}-\mathbf{r_{2}}|} - \frac{1}{2}\Omega^{2}r^{2} \right) U ( r ) = ( − ∣ r − r 1 ∣ G m 1 − ∣ r − r 2 ∣ G m 2 − 2 1 Ω 2 r 2 ) Y ya vimos que m 1 m_{1} m 1 r 1 = ( − μ , 0 ) r_{1}=(-\mu, 0) r 1 = ( − μ , 0 ) m 2 m_{2} m 2 r 2 = ( 1 − μ , 0 ) r_{2}=(1-\mu, 0) r 2 = ( 1 − μ , 0 )
Dado que m 1 m_1 m 1 r 1 = ( − μ , 0 ) r_1 = (-\mu, 0) r 1 = ( − μ , 0 ) m 2 m_2 m 2 r 2 = ( 1 − μ , 0 ) r_2 = (1-\mu, 0) r 2 = ( 1 − μ , 0 ) U ( r ) U(r) U ( r ) x , y , z x, y, z x , y , z
Distancia entre r \mathbf{r} r r 1 \mathbf{r_1} r 1
∣ r − r 1 ∣ = ( x + μ ) 2 + y 2 |\mathbf{r} - \mathbf{r_1}| = \sqrt{(x + \mu)^2 + y^2} ∣ r − r 1 ∣ = ( x + μ ) 2 + y 2 Distancia entre r \mathbf{r} r r 2 \mathbf{r_2} r 2
∣ r − r 2 ∣ = ( x − ( 1 − μ ) ) 2 + y 2 |\mathbf{r} - \mathbf{r_2}| = \sqrt{(x - (1-\mu))^2 + y^2} ∣ r − r 2 ∣ = ( x − ( 1 − μ ) ) 2 + y 2 Sustituyendo estas expresiones en el potencial efectivo U ( r ) U(r) U ( r )
U ( x , y ) = − 1 − μ ( x + μ ) 2 + y 2 − μ ( x − ( 1 − μ ) ) 2 + y 2 − 1 2 ( x 2 + y 2 ) U(x, y) = -\frac{1-\mu}{\sqrt{(x + \mu)^2 + y^2}} - \frac{\mu}{\sqrt{(x - (1-\mu))^2 + y^2}} - \frac{1}{2}(x^2 + y^2) U ( x , y ) = − ( x + μ ) 2 + y 2 1 − μ − ( x − ( 1 − μ ) ) 2 + y 2 μ − 2 1 ( x 2 + y 2 ) Para obtener las ecuaciones de movimiento a partir de la ecuación de aceleración dada, recordamos que
a ′ + 2 Ω × v ′ = r ¨ + 2 Ω × r ˙ = − ∇ U ( r ) , \mathbf{a'} + 2\Omega \times \mathbf{v'} =\ddot{\mathbf{r}} + 2\mathbf{\Omega} \times \dot{\mathbf{r}} = - \nabla U(\mathbf{r}), a ′ + 2Ω × v ′ = r ¨ + 2 Ω × r ˙ = − ∇ U ( r ) , Primero vemos que el término de Coriolis 2 Ω × r ˙ 2\mathbf{\Omega} \times \dot{\mathbf{r}} 2 Ω × r ˙
2 Ω × r ˙ = 2 ( 0 0 Ω ) × ( x ˙ y ˙ z ˙ ) = 2 Ω ( − y ˙ x ˙ 0 ) . 2\mathbf{\Omega} \times \dot{\mathbf{r}} = 2 \begin{pmatrix} 0 \\ 0 \\ \Omega \end{pmatrix} \times \begin{pmatrix} \dot{x} \\ \dot{y} \\ \dot{z} \end{pmatrix} = 2\Omega \begin{pmatrix} -\dot{y} \\ \dot{x} \\ 0 \end{pmatrix}. 2 Ω × r ˙ = 2 ⎝ ⎛ 0 0 Ω ⎠ ⎞ × ⎝ ⎛ x ˙ y ˙ z ˙ ⎠ ⎞ = 2Ω ⎝ ⎛ − y ˙ x ˙ 0 ⎠ ⎞ . Y como Ω = 1 \Omega =1 Ω = 1
x ¨ − 2 y ˙ = − ∂ U ∂ x , \ddot{x} - 2 \dot{y} = -\frac{\partial U}{\partial x}, x ¨ − 2 y ˙ = − ∂ x ∂ U , y ¨ + 2 x ˙ = − ∂ U ∂ y , \ddot{y} + 2\dot{x} = -\frac{\partial U}{\partial y}, y ¨ + 2 x ˙ = − ∂ y ∂ U , z ¨ = − ∂ U ∂ z . \ddot{z} = -\frac{\partial U}{\partial z}. z ¨ = − ∂ z ∂ U . El potencial U ( x , y ) U(x, y) U ( x , y )
U ( x , y ) = − 1 − μ ( x + μ ) 2 + y 2 − μ ( x − 1 + μ ) 2 + y 2 − 1 2 ( x 2 + y 2 ) . U(x, y) = -\frac{1 - \mu}{\sqrt{(x + \mu)^2 + y^2}} - \frac{\mu}{\sqrt{(x - 1 + \mu)^2 + y^2}} - \frac{1}{2} \left(x^2 + y^2 \right). U ( x , y ) = − ( x + μ ) 2 + y 2 1 − μ − ( x − 1 + μ ) 2 + y 2 μ − 2 1 ( x 2 + y 2 ) . Entonces, los gradientes son:
∂ U ∂ x = ( 1 − μ ) ( x + μ ) [ ( x + μ ) 2 + y 2 ] 3 / 2 + μ ( x − 1 + μ ) [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 − x , \frac{\partial U}{\partial x} = \frac{(1 - \mu)(x + \mu)}{\left[(x + \mu)^2 + y^2\right]^{3/2}} + \frac{\mu(x - 1 + \mu)}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} - x, ∂ x ∂ U = [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) ( x + μ ) + [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ ( x − 1 + μ ) − x , ∂ U ∂ y = ( 1 − μ ) y [ ( x + μ ) 2 + y 2 ] 3 / 2 + μ y [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 − y . \frac{\partial U}{\partial y} = \frac{(1 - \mu)y}{\left[(x + \mu)^2 + y^2\right]^{3/2}} + \frac{\mu y}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} - y. ∂ y ∂ U = [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) y + [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ y − y . Sustituimos estos gradientes en las ecuaciones de movimiento:
x ¨ − 2 y ˙ = − [ ( 1 − μ ) ( x + μ ) [ ( x + μ ) 2 + y 2 ] 3 / 2 + μ ( x − 1 + μ ) [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 − x ] , \ddot{x} - 2 \dot{y} = -\left[ \frac{(1 - \mu)(x + \mu)}{\left[(x + \mu)^2 + y^2\right]^{3/2}} + \frac{\mu(x - 1 + \mu)}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} - x \right], x ¨ − 2 y ˙ = − [ [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) ( x + μ ) + [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ ( x − 1 + μ ) − x ] , x ¨ = 2 y ˙ − ( 1 − μ ) ( x + μ ) [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ ( x − 1 + μ ) [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + x . \ddot{x} = 2 \dot{y} - \frac{(1 - \mu)(x + \mu)}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu(x - 1 + \mu)}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + x. x ¨ = 2 y ˙ − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) ( x + μ ) − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ ( x − 1 + μ ) + x . y ¨ + 2 x ˙ = − [ ( 1 − μ ) y [ ( x + μ ) 2 + y 2 ] 3 / 2 + μ y [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 − y ] , \ddot{y} + 2 \dot{x} = -\left[ \frac{(1 - \mu)y}{\left[(x + \mu)^2 + y^2\right]^{3/2}} + \frac{\mu y}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} - y \right], y ¨ + 2 x ˙ = − [ [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) y + [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ y − y ] , y ¨ = − 2 x ˙ − ( 1 − μ ) y [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ y [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + y . \ddot{y} = -2 \dot{x} - \frac{(1 - \mu)y}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu y}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + y. y ¨ = − 2 x ˙ − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) y − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ y + y . Dado que el potencial V ( x , y ) V(x, y) V ( x , y ) z z z z z z
z ¨ = 0. \ddot{z} = 0. z ¨ = 0. Por lo tanto:
x ¨ = 2 y ˙ − ( 1 − μ ) ( x + μ ) [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ ( x − 1 + μ ) [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + x , \ddot{x} = 2 \dot{y} - \frac{(1 - \mu)(x + \mu)}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu(x - 1 + \mu)}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + x, x ¨ = 2 y ˙ − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) ( x + μ ) − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ ( x − 1 + μ ) + x , y ¨ = − 2 x ˙ − ( 1 − μ ) y [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ y [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + y , \ddot{y} = -2 \dot{x} - \frac{(1 - \mu)y}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu y}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + y, y ¨ = − 2 x ˙ − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) y − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ y + y , z ¨ = 0. \ddot{z} = 0. z ¨ = 0. Para resolver las ecuaciones de movimiento necesitamos convertirlas a un sistema de primer orden. Entonces definimos:
v x = x ˙ , v y = y ˙ , v z = z ˙ v_x = \dot{x}, \quad v_y = \dot{y}, \quad v_z = \dot{z} v x = x ˙ , v y = y ˙ , v z = z ˙ entonces las aceleraciones se escriben como derivadas de las velocidades:
v ˙ x = x ¨ , v ˙ y = y ¨ , v ˙ z = z ¨ . \begin{aligned} \dot{v}_x &= \ddot{x}, \\ \dot{v}_y &= \ddot{y}, \\ \dot{v}_z &= \ddot{z}. \end{aligned} v ˙ x v ˙ y v ˙ z = x ¨ , = y ¨ , = z ¨ . Ahora, sustituimos las ecuaciones de segundo grado para x ¨ \ddot{x} x ¨ y ¨ \ddot{y} y ¨ z ¨ \ddot{z} z ¨
x ¨ = 2 v y − ( 1 − μ ) ( x + μ ) [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ ( x − 1 + μ ) [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + x \ddot{x} = 2 v_y - \frac{(1 - \mu)(x + \mu)}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu(x - 1 + \mu)}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + x x ¨ = 2 v y − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) ( x + μ ) − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ ( x − 1 + μ ) + x Se convierte en:
v ˙ x = 2 v y − ( 1 − μ ) ( x + μ ) [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ ( x − 1 + μ ) [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + x \dot{v}_x = 2 v_y - \frac{(1 - \mu)(x + \mu)}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu(x - 1 + \mu)}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + x v ˙ x = 2 v y − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) ( x + μ ) − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ ( x − 1 + μ ) + x y ¨ = − 2 v x − ( 1 − μ ) y [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ y [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + y \ddot{y} = -2 v_x - \frac{(1 - \mu)y}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu y}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + y y ¨ = − 2 v x − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) y − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ y + y Se convierte en:
v ˙ y = − 2 v x − ( 1 − μ ) y [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ y [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + y \dot{v}_y = -2 v_x - \frac{(1 - \mu)y}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu y}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + y v ˙ y = − 2 v x − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) y − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ y + y z ¨ = 0 \ddot{z} = 0 z ¨ = 0 Se convierte en:
v ˙ z = 0 \dot{v}_z = 0 v ˙ z = 0 El sistema de ecuaciones de primer grado que describe el movimiento del cuerpo en el plano x y xy x y
x ˙ = v x , y ˙ = v y , v ˙ x = 2 v y − ( 1 − μ ) ( x + μ ) [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ ( x − 1 + μ ) [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + x , v ˙ y = − 2 v x − ( 1 − μ ) y [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ y [ ( x − 1 + μ ) 2 + y 2 ] 3 / 2 + y , \begin{aligned} \dot{x} &= v_x, \\ \dot{y} &= v_y, \\ \dot{v}_x &= 2 v_y - \frac{(1 - \mu)(x + \mu)}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu(x - 1 + \mu)}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + x, \\ \dot{v}_y &= -2 v_x - \frac{(1 - \mu)y}{\left[(x + \mu)^2 + y^2\right]^{3/2}} - \frac{\mu y}{\left[(x - 1 + \mu)^2 + y^2\right]^{3/2}} + y, \\ \end{aligned} x ˙ y ˙ v ˙ x v ˙ y = v x , = v y , = 2 v y − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) ( x + μ ) − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ ( x − 1 + μ ) + x , = − 2 v x − [ ( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) y − [ ( x − 1 + μ ) 2 + y 2 ] 3/2 μ y + y ,