Para simplificar el análisis del problema, realizamos una transformación de coordenadas entre el sistema de referencia sideral ( X , Y ) (X, Y) ( X , Y ) sinódico ( x , y ) (x, y) ( x , y ) ω \omega ω
Consideremos la transformación entre coordenadas siderales ( X , Y ) (X, Y) ( X , Y ) ( x , y ) (x, y) ( x , y )
X = x cos ( ω t ) − y sin ( ω t ) , Y = x sin ( ω t ) + y cos ( ω t ) , \begin{aligned} X &= x \cos(\omega t) - y \sin(\omega t), \\ Y &= x \sin(\omega t) + y \cos(\omega t), \end{aligned} X Y = x cos ( ω t ) − y sin ( ω t ) , = x sin ( ω t ) + y cos ( ω t ) , ω \omega ω
Definimos la función generadora W W W ( P X , P Y ) (P_X, P_Y) ( P X , P Y ) ( x , y ) (x, y) ( x , y )
W = P X X + P Y Y W =P_{X}X + P_{Y}Y W = P X X + P Y Y W = P X ( x cos ( ω t ) − y sin ( ω t ) ) + P Y ( x sin ( ω t ) + y cos ( ω t ) ) . W = P_X \left( x \cos(\omega t) - y \sin(\omega t) \right) + P_Y \left( x \sin(\omega t) + y \cos(\omega t) \right). W = P X ( x cos ( ω t ) − y sin ( ω t ) ) + P Y ( x sin ( ω t ) + y cos ( ω t ) ) . A partir de la función generadora, obtenemos las siguientes relaciones canónicas:
X = ∂ W ∂ P X = x cos ( ω t ) − y sin ( ω t ) , Y = ∂ W ∂ P Y = x sin ( ω t ) + y cos ( ω t ) , p x = ∂ W ∂ x = P X cos ( ω t ) + P Y sin ( ω t ) , p y = ∂ W ∂ y = − P X sin ( ω t ) + P Y cos ( ω t ) . \begin{aligned} X &= \frac{\partial W}{\partial P_X} = x \cos(\omega t) - y \sin(\omega t), \\ Y &= \frac{\partial W}{\partial P_Y} = x \sin(\omega t) + y \cos(\omega t), \\ p_x &= \frac{\partial W}{\partial x} = P_X \cos(\omega t) + P_Y \sin(\omega t), \\ p_y &= \frac{\partial W}{\partial y} = -P_X \sin(\omega t) + P_Y \cos(\omega t). \end{aligned} X Y p x p y = ∂ P X ∂ W = x cos ( ω t ) − y sin ( ω t ) , = ∂ P Y ∂ W = x sin ( ω t ) + y cos ( ω t ) , = ∂ x ∂ W = P X cos ( ω t ) + P Y sin ( ω t ) , = ∂ y ∂ W = − P X sin ( ω t ) + P Y cos ( ω t ) . Calculamos la derivada total de W W W t t t
W = P X [ x cos ( ω t ) − y sin ( ω t ) ] + P Y [ x sin ( ω t ) + y cos ( ω t ) ] W = P_X \left[ x \cos(\omega t) - y \sin(\omega t) \right] + P_Y \left[ x \sin(\omega t) + y \cos(\omega t) \right] W = P X [ x cos ( ω t ) − y sin ( ω t ) ] + P Y [ x sin ( ω t ) + y cos ( ω t ) ] d d t ( P X [ x cos ( ω t ) − y sin ( ω t ) ] ) = P X [ − x ω sin ( ω t ) − y ω cos ( ω t ) ] \frac{d}{dt} \left( P_X \left[ x \cos(\omega t) - y \sin(\omega t) \right] \right) = P_X \left[ -x \omega \sin(\omega t) - y \omega \cos(\omega t) \right] d t d ( P X [ x cos ( ω t ) − y sin ( ω t ) ] ) = P X [ − x ω sin ( ω t ) − y ω cos ( ω t ) ] d d t ( P Y [ x sin ( ω t ) + y cos ( ω t ) ] ) = P Y [ x ω cos ( ω t ) − y ω sin ( ω t ) ] \frac{d}{dt} \left( P_Y \left[ x \sin(\omega t) + y \cos(\omega t) \right] \right) = P_Y \left[ x \omega \cos(\omega t) - y \omega \sin(\omega t) \right] d t d ( P Y [ x sin ( ω t ) + y cos ( ω t ) ] ) = P Y [ x ω cos ( ω t ) − y ω sin ( ω t ) ] d W d t = P X [ − x ω sin ( ω t ) − y ω cos ( ω t ) ] + P Y [ x ω cos ( ω t ) − y ω sin ( ω t ) ] \frac{dW}{dt} = P_X \left[ -x \omega \sin(\omega t) - y \omega \cos(\omega t) \right] + P_Y \left[ x \omega \cos(\omega t) - y \omega \sin(\omega t) \right] d t d W = P X [ − x ω sin ( ω t ) − y ω cos ( ω t ) ] + P Y [ x ω cos ( ω t ) − y ω sin ( ω t ) ] d W d t = ω ( − P X x sin ( ω t ) − P X y cos ( ω t ) + P Y x cos ( ω t ) − P Y y sin ( ω t ) ) \frac{dW}{dt} = \omega \left( -P_X x \sin(\omega t) - P_X y \cos(\omega t) + P_Y x \cos(\omega t) - P_Y y \sin(\omega t) \right) d t d W = ω ( − P X x sin ( ω t ) − P X y cos ( ω t ) + P Y x cos ( ω t ) − P Y y sin ( ω t ) ) d W d t = − ω P X ( x sin ( ω t ) + y cos ( ω t ) ) + ω P Y ( x cos ( ω t ) − y sin ( ω t ) ) = ω ( Y P X − X P Y ) . \frac{dW}{dt} = -\omega P_X \left( x \sin(\omega t) + y \cos(\omega t) \right) + \omega P_Y \left( x \cos(\omega t) - y \sin(\omega t) \right) = \omega (Y P_X - X P_Y). d t d W = − ω P X ( x sin ( ω t ) + y cos ( ω t ) ) + ω P Y ( x cos ( ω t ) − y sin ( ω t ) ) = ω ( Y P X − X P Y ) . El nuevo Hamiltoniano J J J
J = H + d W d t , J = H + \frac{dW}{dt}, J = H + d t d W , donde H H H
Teníamos que el potencial efectivo era:
U ( x , y ) = − 1 − μ ( x + μ ) 2 + y 2 − μ ( x − ( 1 − μ ) ) 2 + y 2 U(x, y) = -\frac{1-\mu}{\sqrt{(x + \mu)^2 + y^2}} - \frac{\mu}{\sqrt{(x - (1-\mu))^2 + y^2}} U ( x , y ) = − ( x + μ ) 2 + y 2 1 − μ − ( x − ( 1 − μ ) ) 2 + y 2 μ La energía cinética es:
T = 1 2 ( p x 2 + p y 2 ) . T = \frac{1}{2}(p_x^2 + p_y^2). T = 2 1 ( p x 2 + p y 2 ) . Entonces, el Hamiltoniano completo sería:
H ( X , Y , P X , P Y ) = 1 2 ( P X 2 + P Y 2 ) − 1 − μ ( X + μ ) 2 + Y 2 − μ ( X − ( 1 − μ ) ) 2 + Y 2 H(X, Y, P_X, P_Y) = \frac{1}{2}(P_X^2 + P_Y^2) - \frac{1-\mu}{\sqrt{(X + \mu)^2 + Y^2}} - \frac{\mu}{\sqrt{(X - (1-\mu))^2 + Y^2}} H ( X , Y , P X , P Y ) = 2 1 ( P X 2 + P Y 2 ) − ( X + μ ) 2 + Y 2 1 − μ − ( X − ( 1 − μ ) ) 2 + Y 2 μ Sustituyendo H H H d W d t \frac{dW}{dt} d t d W J J J
J = H + d W d t = 1 2 ( P X 2 + P Y 2 ) − 1 − μ ( X + μ ) 2 + Y 2 − μ ( X − ( 1 − μ ) ) 2 + Y 2 + ω ( Y P X − X P Y ) . \begin{align*} J &= H + \frac{dW}{dt} \\ &= \frac{1}{2}(P_X^2 + P_Y^2) - \frac{1-\mu}{\sqrt{(X + \mu)^2 + Y^2}} - \frac{\mu}{\sqrt{(X - (1-\mu))^2 + Y^2}} + \omega (Y P_X - X P_Y). \end{align*} J = H + d t d W = 2 1 ( P X 2 + P Y 2 ) − ( X + μ ) 2 + Y 2 1 − μ − ( X − ( 1 − μ ) ) 2 + Y 2 μ + ω ( Y P X − X P Y ) . Utilizando las relaciones de transformación:
X = x cos ( ω t ) − y sin ( ω t ) , Y = x sin ( ω t ) + y cos ( ω t ) , P X = p x cos ( ω t ) + p y sin ( ω t ) , P Y = − p x sin ( ω t ) + p y cos ( ω t ) , \begin{aligned} X &= x \cos(\omega t) - y \sin(\omega t), \\ Y &= x \sin(\omega t) + y \cos(\omega t), \\ P_X &= p_x \cos(\omega t) + p_y \sin(\omega t), \\ P_Y &= -p_x \sin(\omega t) + p_y \cos(\omega t), \end{aligned} X Y P X P Y = x cos ( ω t ) − y sin ( ω t ) , = x sin ( ω t ) + y cos ( ω t ) , = p x cos ( ω t ) + p y sin ( ω t ) , = − p x sin ( ω t ) + p y cos ( ω t ) , J ( x , y , p x , p y ) = 1 2 ( p x 2 + p y 2 ) − 1 − μ ( x + μ ) 2 + y 2 − μ ( x − ( 1 − μ ) ) 2 + y 2 + ω ( y p x − x p y ) . J(x, y, p_x, p_y) = \frac{1}{2}(p_x^2 + p_y^2) - \frac{1-\mu}{\sqrt{(x + \mu)^2 + y^2}} - \frac{\mu}{\sqrt{(x - (1-\mu))^2 + y^2}} + \omega (y p_x - x p_y). J ( x , y , p x , p y ) = 2 1 ( p x 2 + p y 2 ) − ( x + μ ) 2 + y 2 1 − μ − ( x − ( 1 − μ ) ) 2 + y 2 μ + ω ( y p x − x p y ) . Aplicando las ecuaciones de Hamilton al Hamiltoniano J J J
x ˙ = ∂ J ∂ p x = p x + ω y , y ˙ = ∂ J ∂ p y = p y − ω x , p x ˙ = − ∂ J ∂ x = ( 1 − μ ) ( x + μ ) [ ( x + μ ) 2 + y 2 ] 3 / 2 + μ ( x − ( 1 − μ ) ) [ ( x − ( 1 − μ ) ) 2 + y 2 ] 3 / 2 + ω p y , p y ˙ = − ∂ J ∂ y = − ( 1 − μ ) y [ ( x + μ ) 2 + y 2 ] 3 / 2 − μ y [ ( x − ( 1 − μ ) ) 2 + y 2 ] 3 / 2 − ω p x . \begin{aligned} \dot{x} &= \frac{\partial J}{\partial p_x} = p_x + \omega y, \\ \dot{y} &= \frac{\partial J}{\partial p_y} = p_y - \omega x, \\ \dot{p_x} &= -\frac{\partial J}{\partial x} = \frac{(1-\mu)(x+\mu)}{[(x+\mu)^2 + y^2]^{3/2}} + \frac{\mu(x-(1-\mu))}{[(x-(1-\mu))^2 + y^2]^{3/2}} + \omega p_y, \\ \dot{p_y} &= -\frac{\partial J}{\partial y} = -\frac{(1-\mu)y}{[(x+\mu)^2 + y^2]^{3/2}} - \frac{\mu y}{[(x-(1-\mu))^2 + y^2]^{3/2}} - \omega p_x. \end{aligned} x ˙ y ˙ p x ˙ p y ˙ = ∂ p x ∂ J = p x + ω y , = ∂ p y ∂ J = p y − ω x , = − ∂ x ∂ J = [( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) ( x + μ ) + [( x − ( 1 − μ ) ) 2 + y 2 ] 3/2 μ ( x − ( 1 − μ )) + ω p y , = − ∂ y ∂ J = − [( x + μ ) 2 + y 2 ] 3/2 ( 1 − μ ) y − [( x − ( 1 − μ ) ) 2 + y 2 ] 3/2 μ y − ω p x . Estas ecuaciones describen la evolución temporal de las posiciones y los momentos del sistema en el marco sinódico.
mu = 0.0325
@inline function U(x, y, mu)
r1 = sqrt((x + mu)^2 + y^2 )
r2 = sqrt((x - (1 - mu))^2 + y^2 )
return -(1 - mu) / r1 - mu / r2 - 0.5 (x^2 + y^2 )
end
x = LinRange (-3 , 3 , 300 )
y = LinRange (-3 , 3 , 300 )
U_values = [U(xi, yi, mu) for yi in y, xi in x]
levels = [
-3.0 , -2.5 , -2.0 , -1.8 , -1.65 , -1.55 , -1.52 , -1.51 , -1.49 , -1.48
]
p = contour(x, y, U_values,
levels = levels,
color = :RdBu,
linewidth = 1.2 ,
fill = true ,
xlabel = L"x" ,
ylabel = L"y" ,
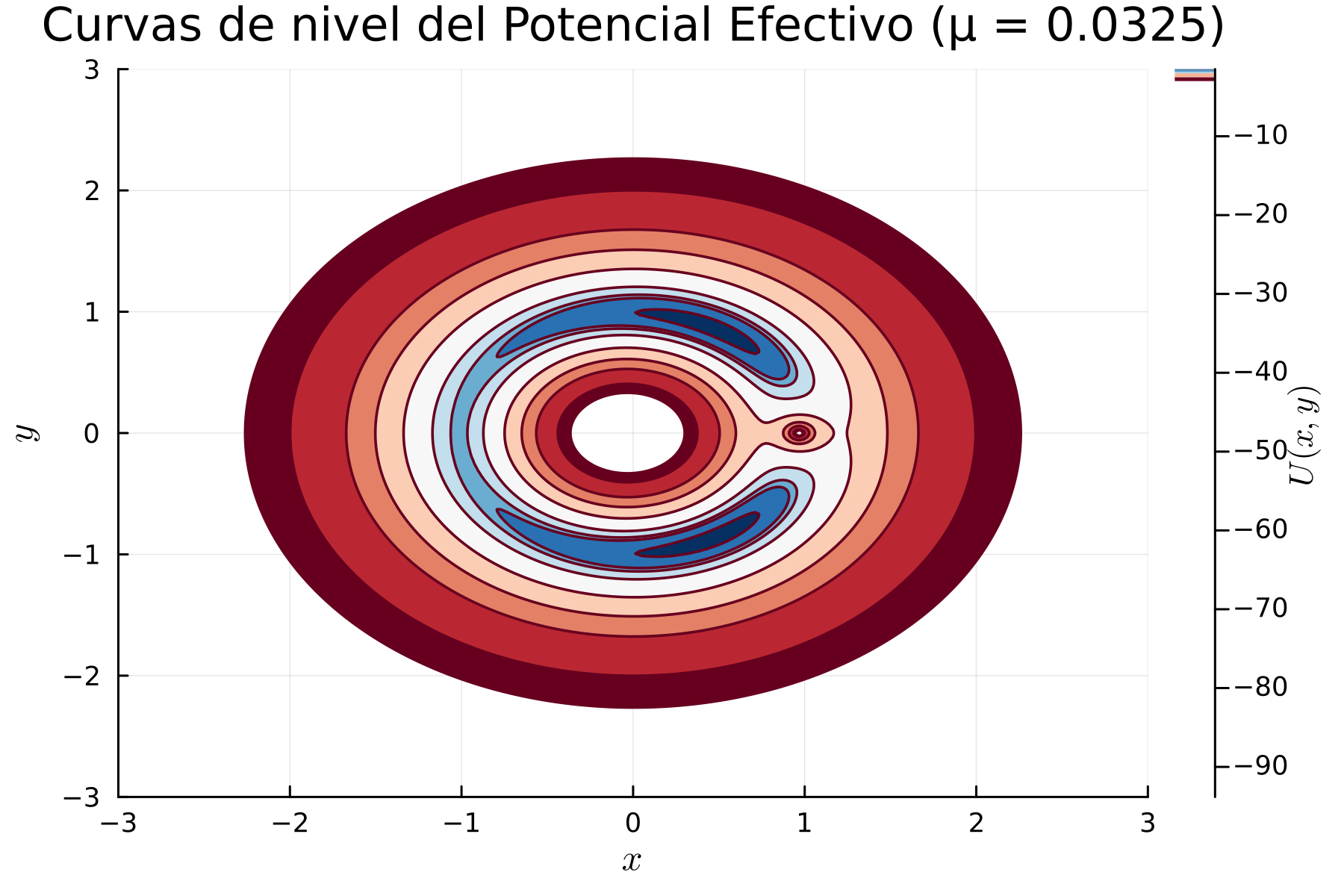
title = "Curvas de nivel del Potencial Efectivo (μ = 0.0325)" ,
colorbar_title = L"U(x,y)" ,
background_color = :white,
foreground_color = :black,
colorbar_formatter = :scientific,
)
display(p)
Función U : Calcula el potencial efectivo U ( x , y ) U(x, y) U ( x , y ) x , y x, y x , y μ \mu μ
Malla : Se crea una malla de puntos ( x , y ) (x, y) ( x , y ) − 3 -3 − 3 3 3 3
Niveles de contorno : Se definen niveles de energía para mostrar las curvas de nivel que representan los valores de energía potencial.
mu_values = LinRange (0.01 , 0.05 , 50 )anim = @animate for mu in mu_values
x = LinRange (-3 , 3 , 300 )
y = LinRange (-3 , 3 , 300 )
U_values = [U(xi, yi, mu) for yi in y, xi in x]
contour(
x, y, U_values,
levels = levels,
color = :RdBu,
linewidth = 1.2 ,
fill = true ,
xlabel = L"x" ,
ylabel = L"y" ,
title = "(μ = $mu )" ,
colorbar_title = L"U(x,y)" ,
background_color = :white,
foreground_color = :black,
colorbar_formatter = :scientific
)
end
gif(anim, "mi_animacion.gif" , fps = 10 )
El enfoque hamiltoniano nos da una forma clara y organizada de entender el sistema de tres cuerpos en un marco de referencia que se mueve con ellos. A través de las curvas de nivel cero del potencial efectivo, podemos visualizar las áreas en el espacio donde la energía cinética del sistema se anula. Esto resulta clave para comprender cómo se mueven y mantienen estables los cuerpos en órbita.
Este análisis es fundamental para identificar zonas de equilibrio y para mapear las posibles trayectorias de cuerpos pequeños.